
Team Members
RAIS4BE Lab was established at National University of Singapore in 2021. We are a multidisciplinary team with civil, mechanical, geodesy and computer engineering backgrounds. Our research focuses on building robotics, autonomous sensing, and AI-driven digital modelling to support intelligent reality capture, high-precision Scan-to-BIM and digital twin, and engineering optimisation for buildings and infrastructures.


Shuju Jing
Research Fellow
Joining
Research Fellow


Difeng Hu
PhD Researcher
Tao Wang
PhD Researcher


Qiao Zheng
PhD Researcher
Kexin Li
PhD Researcher




Josh Li
PhD Researcher
Srivatsan
PhD Researcher


Xiayi Chen
MSc (Research)
Oh Hui Lin
MSc (Research)

Yushuo Wang
MSc (Research)
Runfeng Ma
MSc (Research)


Dian Zhuang
Visiting PhD
Chao Xiang
Visiting PhD

Ben Ben
Lab Companion
Scout
Lab Companion
Mike Li
Research Fellow
Vincent Gan
Assistant Professor


Asiri
Research Associate
Shaobo Li
Research Associate


Yuanyuan Deng
Research Assistant
Jey Chandar
Research Assistant
Melanie Tan
PhD Researcher
Xiuqi Li
PhD Researcher


Bi Jian
Visiting PhD
Ruoming Zhai
Visiting PhD
Robotic Reality Capture & 3D Scanning
Trajectory Optimisation, Semantic Perception & Navigation
Scan2BIM for Buildings, Infrastructures and Industrial Facilities
Our Research & Teaching

CDE Innovation Award




Teaching Excellent Award
Featured Publication
Li, M.K., Gan, V.J.L.,* • Automation in Construction (10.2026)
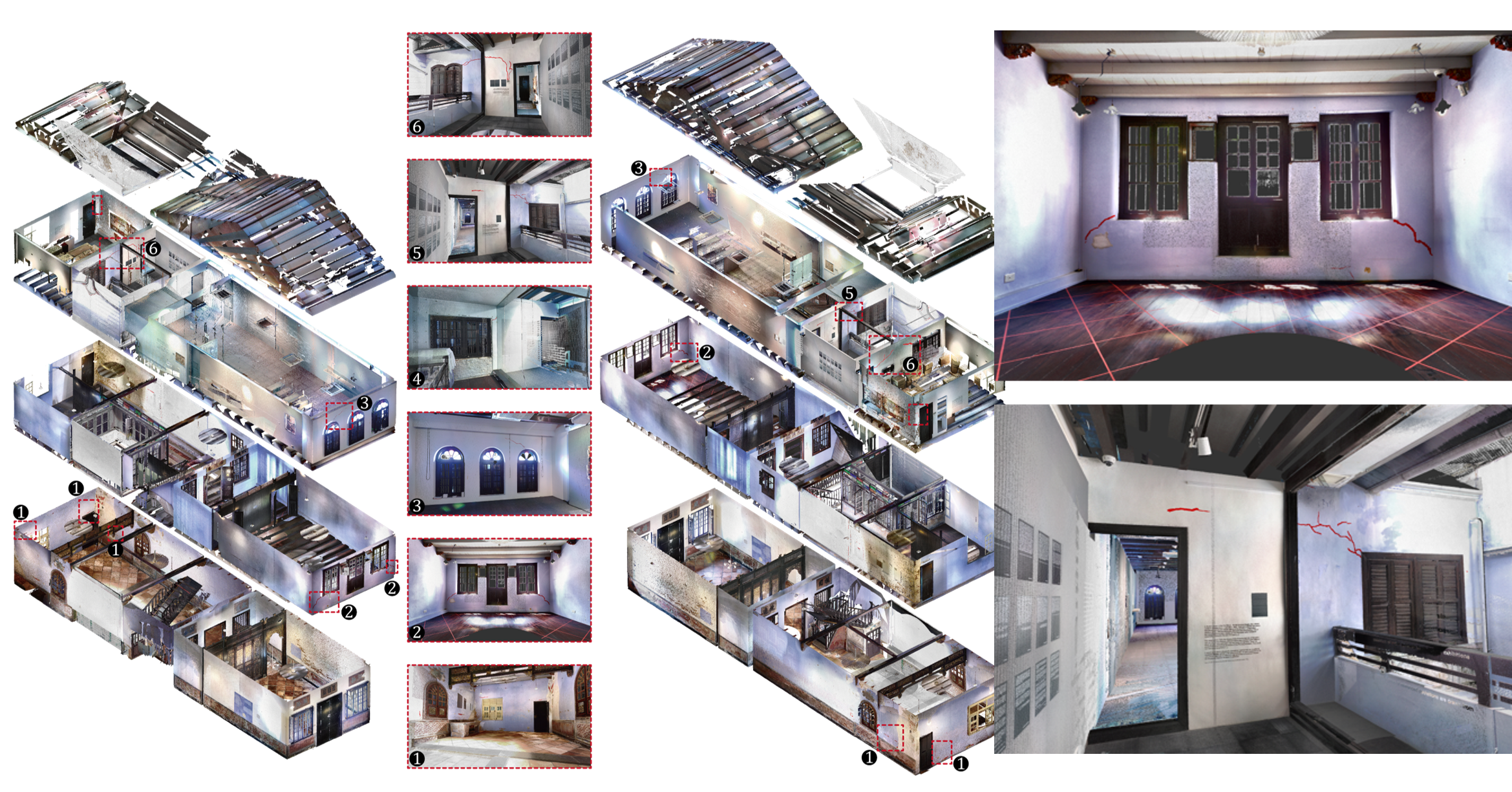
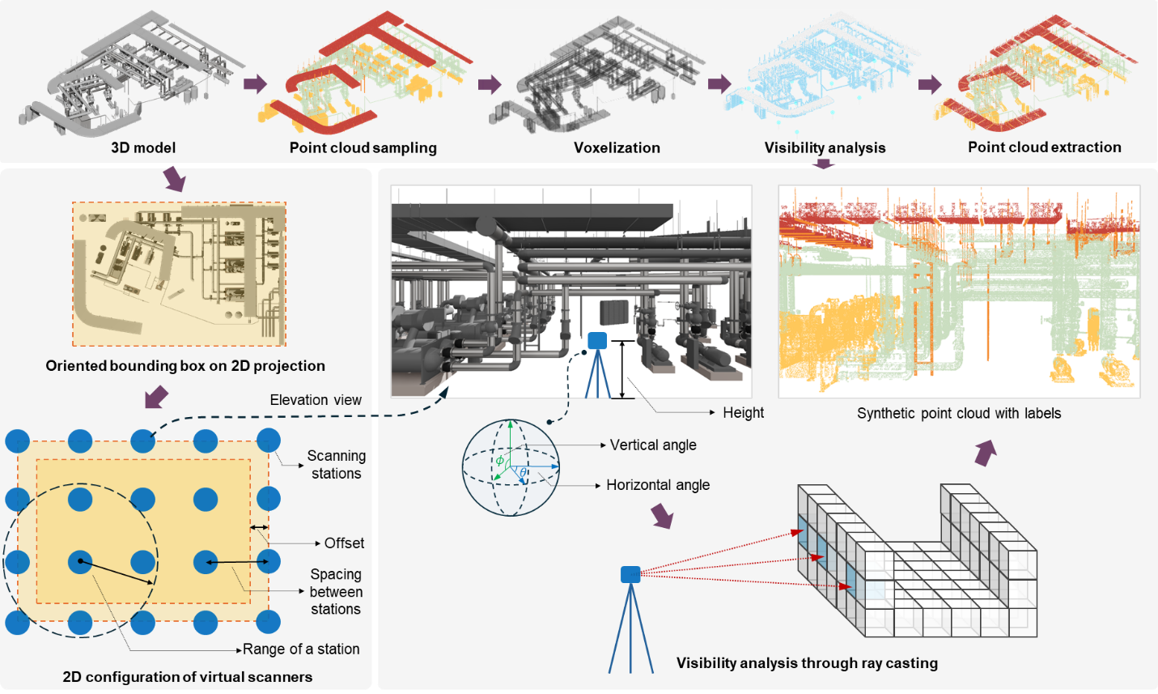
Iterative self-learning with BIM-based sensor perception for manual-annotation-free cross-domain segmentation of MEP point clouds
A sensor perception model is developed to generate BIM-based synthetic point clouds that reflect real scan sampling density, occlusion etc. Iterative self-learning is introduced to support point cloud segmentation to save time and effort in point cloud annotation.
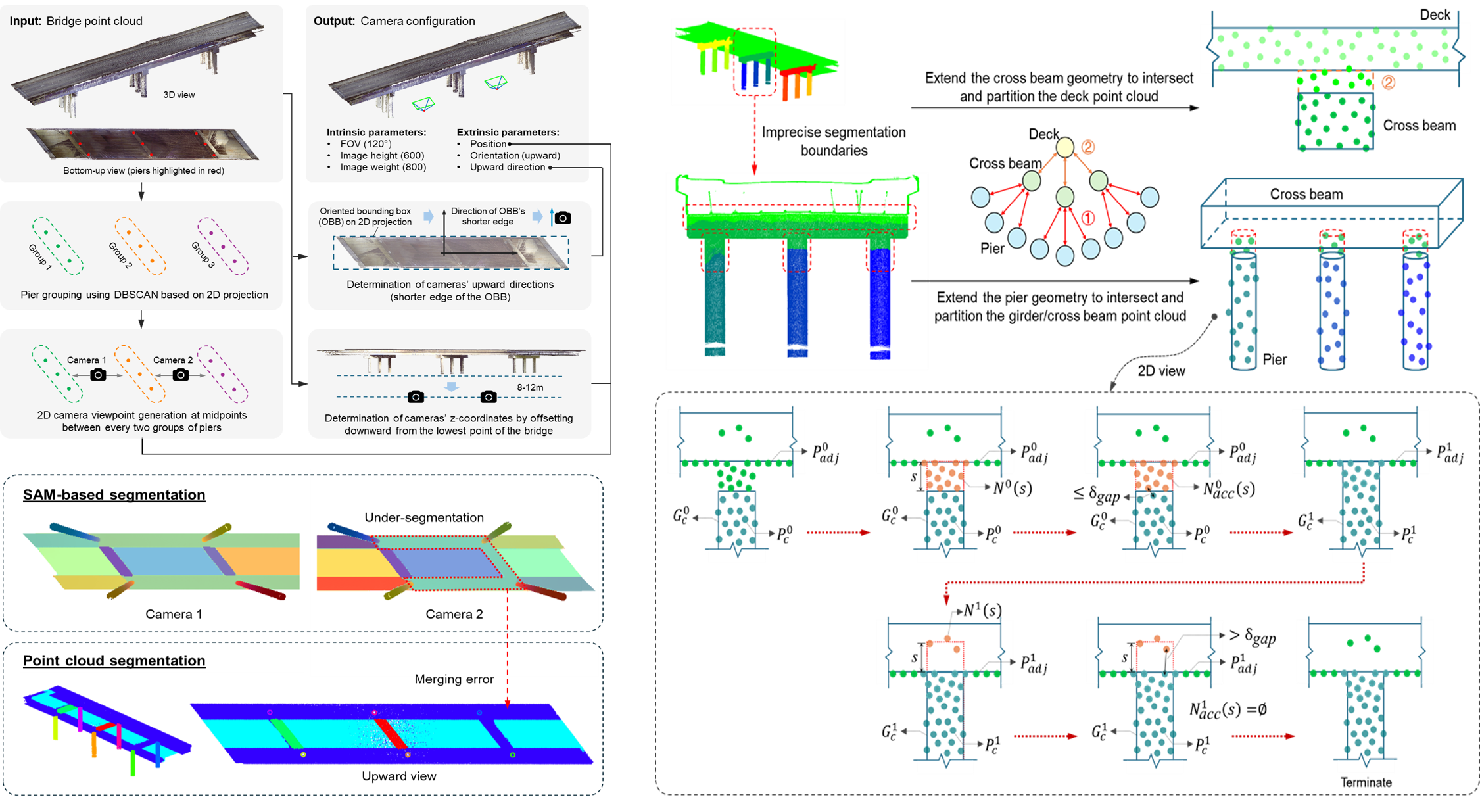
Li, M.K., Gan, V.J.L.,* Li, K.X., • Automation in Construction (8.2026)
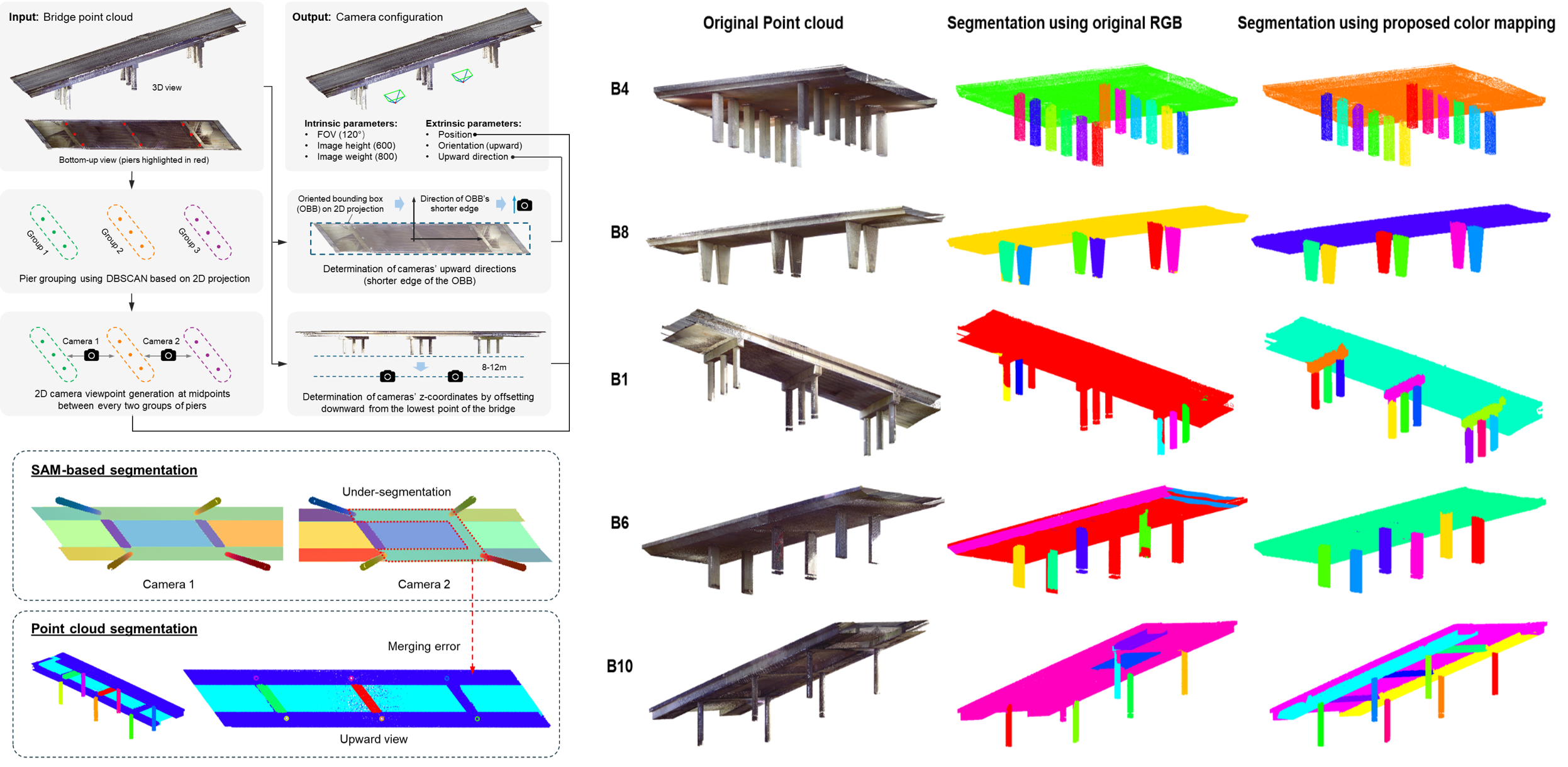
Vision foundation model with connectivity-based inferencing for zero-shot bridge element segmentation and geometric reconstruction
This paper presents BridgeSAM, a vision foundation model that integrates the Segment Anything Model (SAM) with connectivity-based instance segmentation for bridge point cloud processing. BridgeSAM improves bridge element segmentation for bridge 3D modeling.
Deng, Y.Y., Gan, V.J.L.,* • Advanced Engineering Informatics (4.2026)
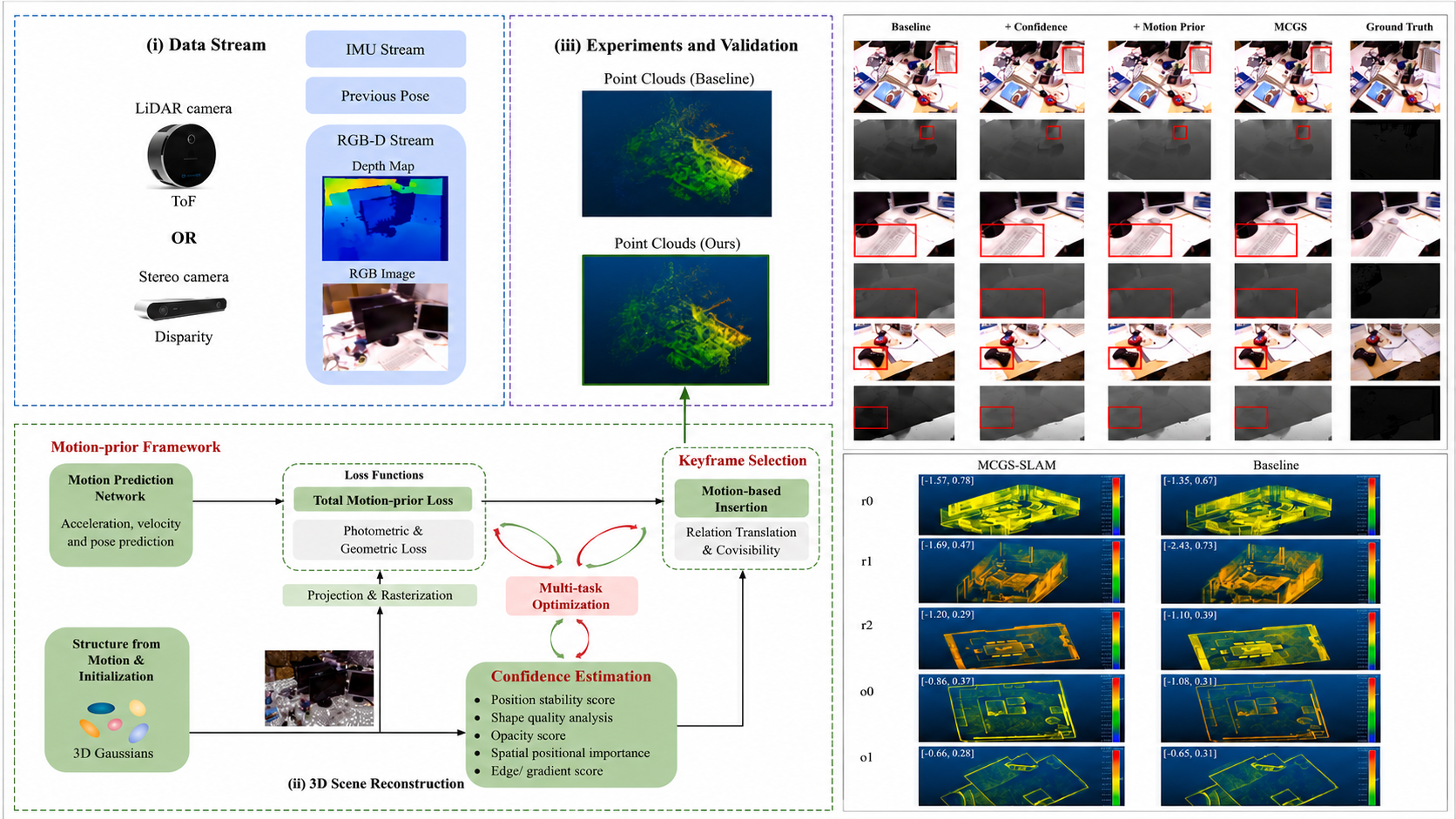
Motion-prior and Confidence-aware Gaussian Splatting (MCGS) SLAM for 3D scene reconstruction of indoor built environments
This paper proposes a motion-prior and confidence-aware Gaussian Splatting (MCGS) SLAM, which hardnesses a probabilistic motion-prior framework, confidence estimation mechanism, and adaptive keyframe selection to guide photorealistic 3D scene reconstruction.
Zheng, Q., Gan, V.J.L.,* Li, M.K., • Automation in Construction (1.2026)
Semantic instance segmentation and automated 3D BIM reconstruction for viaduct using LiDAR point clouds and weakly-supervised learning
This paper presents an AI-based semantic instance segmentation approach that leverages weakly-supervised learning for high-precision segmentation and automated BIM reconstruction of transport infrastructure, focusing on viaducts.

Li, M.K., Gan, V.J.L.,* Wang, B.Y., • Automation in Construction (11.2025)
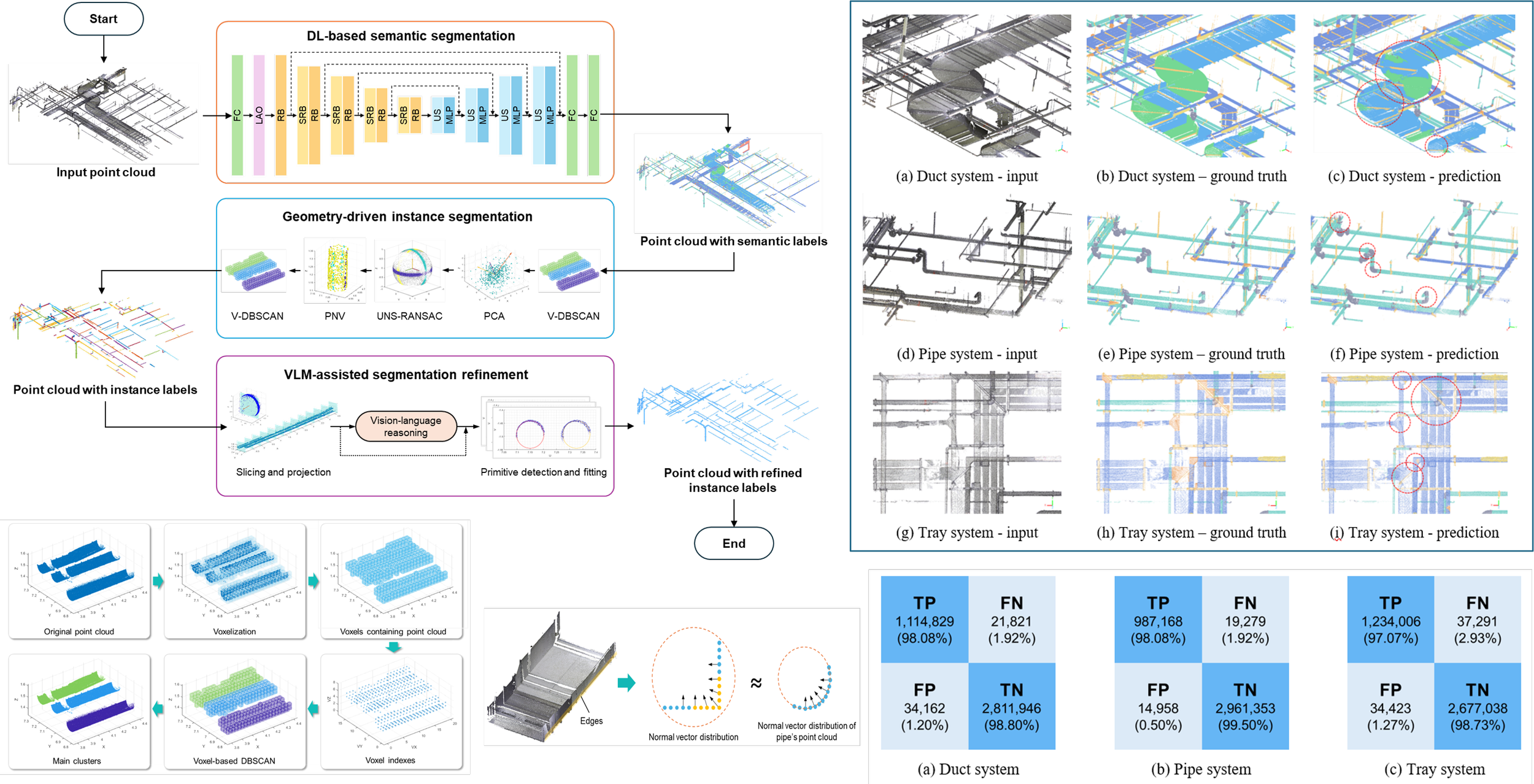
Integrating hierarchical segmentation and vision-language reasoning for spatially complex and occluded MEP point clouds
This paper proposes a hierarchical and progressive segmentation that integrates deep learning-based semantic segmentation, geometry-driven instance segmentation, and vision-language model-assisted refinement for 3D BIM reconstruction of MEP systems.
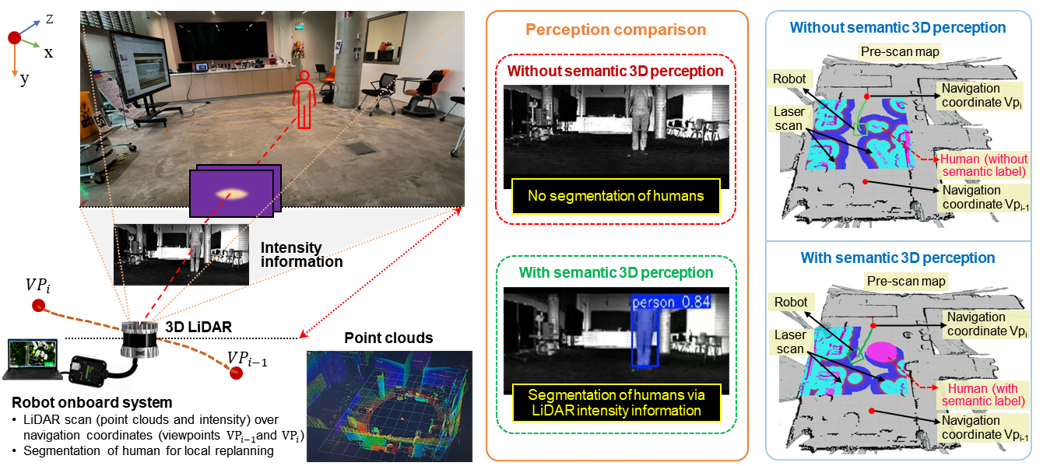
Hu, D.F., Gan, V.J.L.,* • Automation in Construction (3.2025)
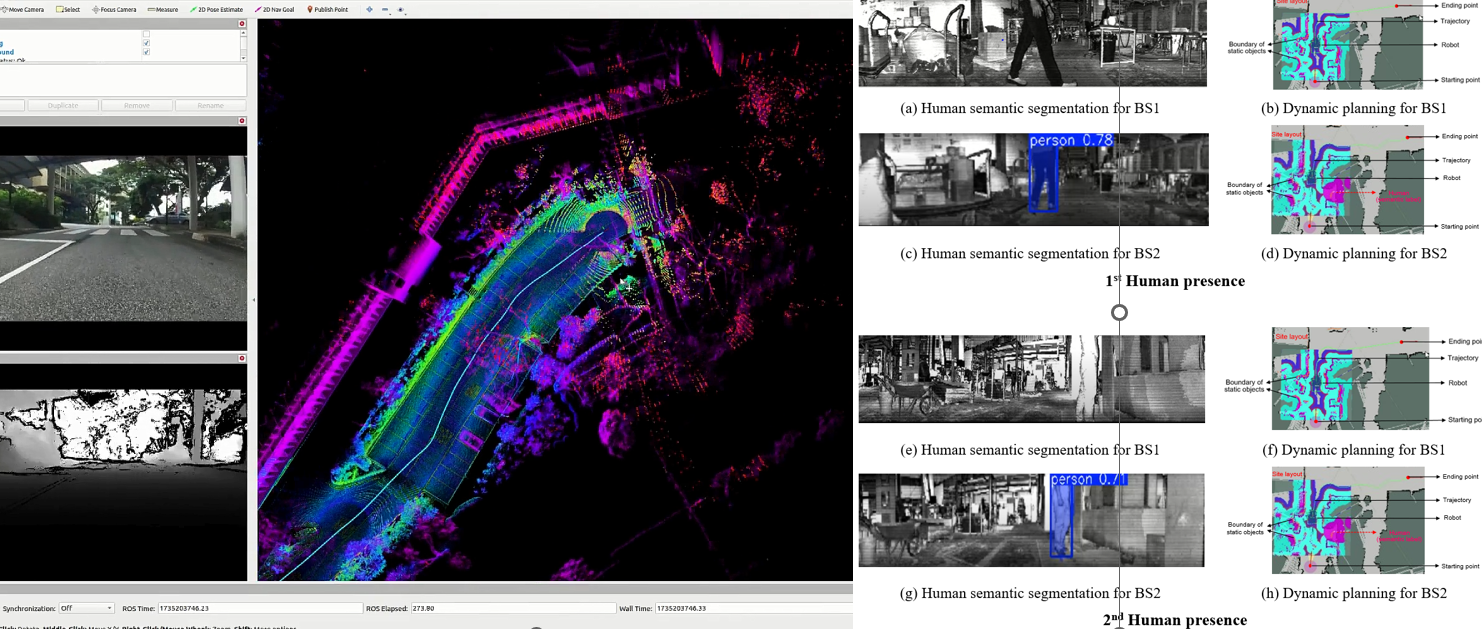
Semantic navigation for automated robotic inspection and indoor environment quality monitoring
This paper proposes a semantic navigation approach to improve robotic inspection. A revised RandLA-Net and KNN algorithm construct a semantic map rich in detailed object information. An object instance reasoning algorithm identifies and extracts target object coordinates from the semantic map. A semantics-aware A* algorithm calculates safer, efficient navigation paths.

Gan, V.J.L., Hu, D.F.,* etc. • Computer-Aided Civil and Infrastructure Engineering (3.2025)
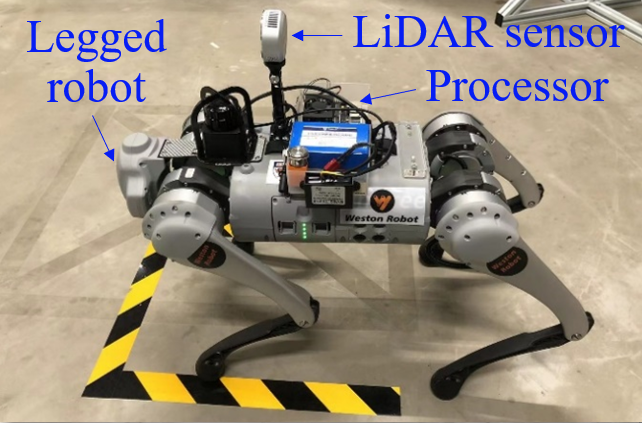
Automated indoor 3D scene reconstruction with decoupled mapping using quadruped robot and LiDAR sensor
This study introduces an optimization algorithm incorporating viewpoint generation, occlusion detection and culling, and robot-moving trajectory identification. The research investigates 3D reconstruction, comparing coupled and decoupled approaches to identify most practical configuration for robotic scanning.

Gan, V.J.L., Li, K.X.,* etc. • Applied Energy (1.2025)
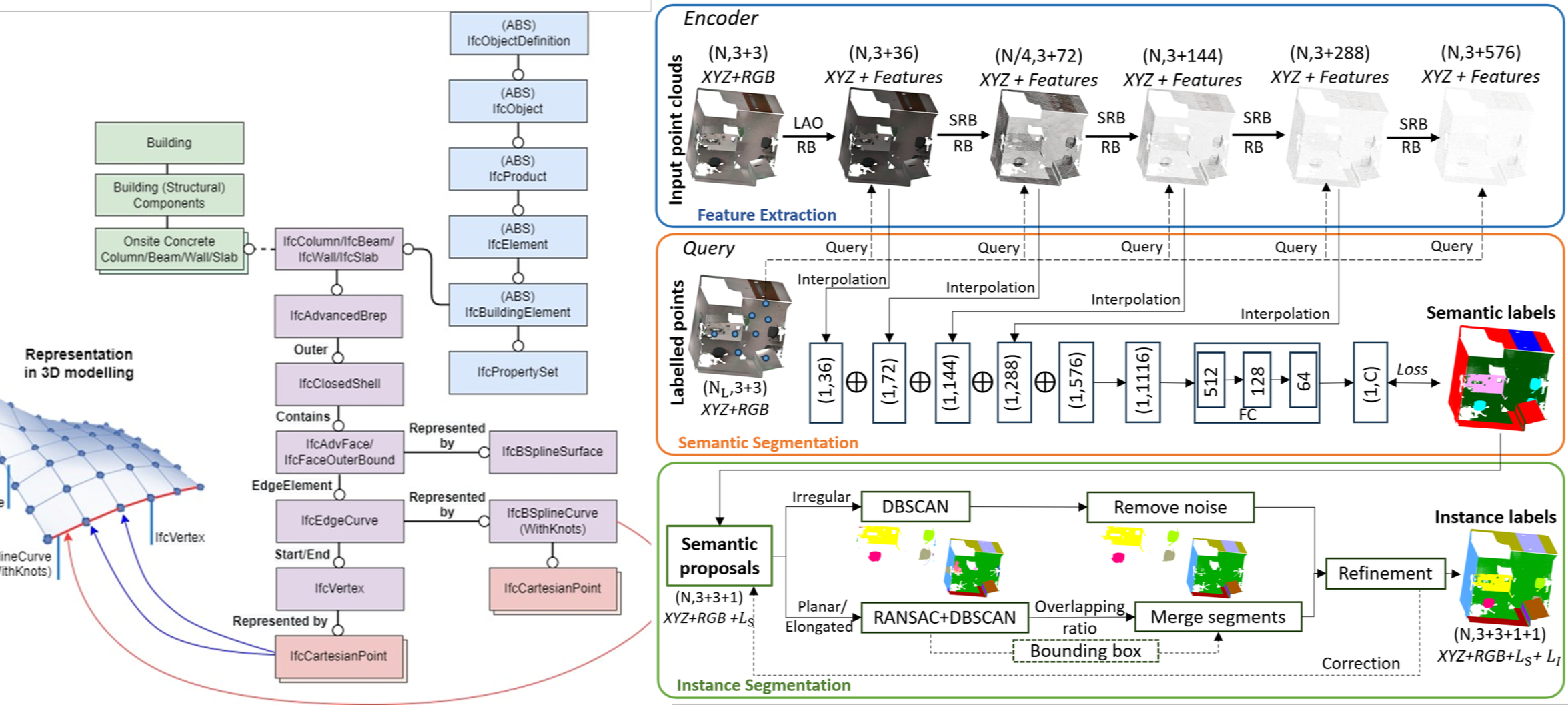
3D reconstruction of BIM with weakly-supervised learning for carbon emission modelling in the built environment
This paper presents weakly-supervised learning for automated BIM reconstruction, aiming at accurate carbon performance evaluation. By employing weakly-supervised semantic segmentation, this approach segments structural components from 3D point clouds and formulates the topological relationships of objects for BIM reconstruction to assess embodied carbon.
Zhai, R., Zou, J., Gan, V.J.L.,* etc. • Automation in Construction (10.2024)
Semantic enrichment of BIM with IndoorGML for quadruped robot navigation and automated 3D scanning
In this paper, BIM data schema is enriched with IndoorGML, integrating building geometry with spatial data to establish an indoor navigation model describing multi-scale spatial topological networks. This navigation model optimizes robot scanning positions and traversal sequences.

Wang, T., Gan, V.J.L.,* • Automation in Construction (10.2024)
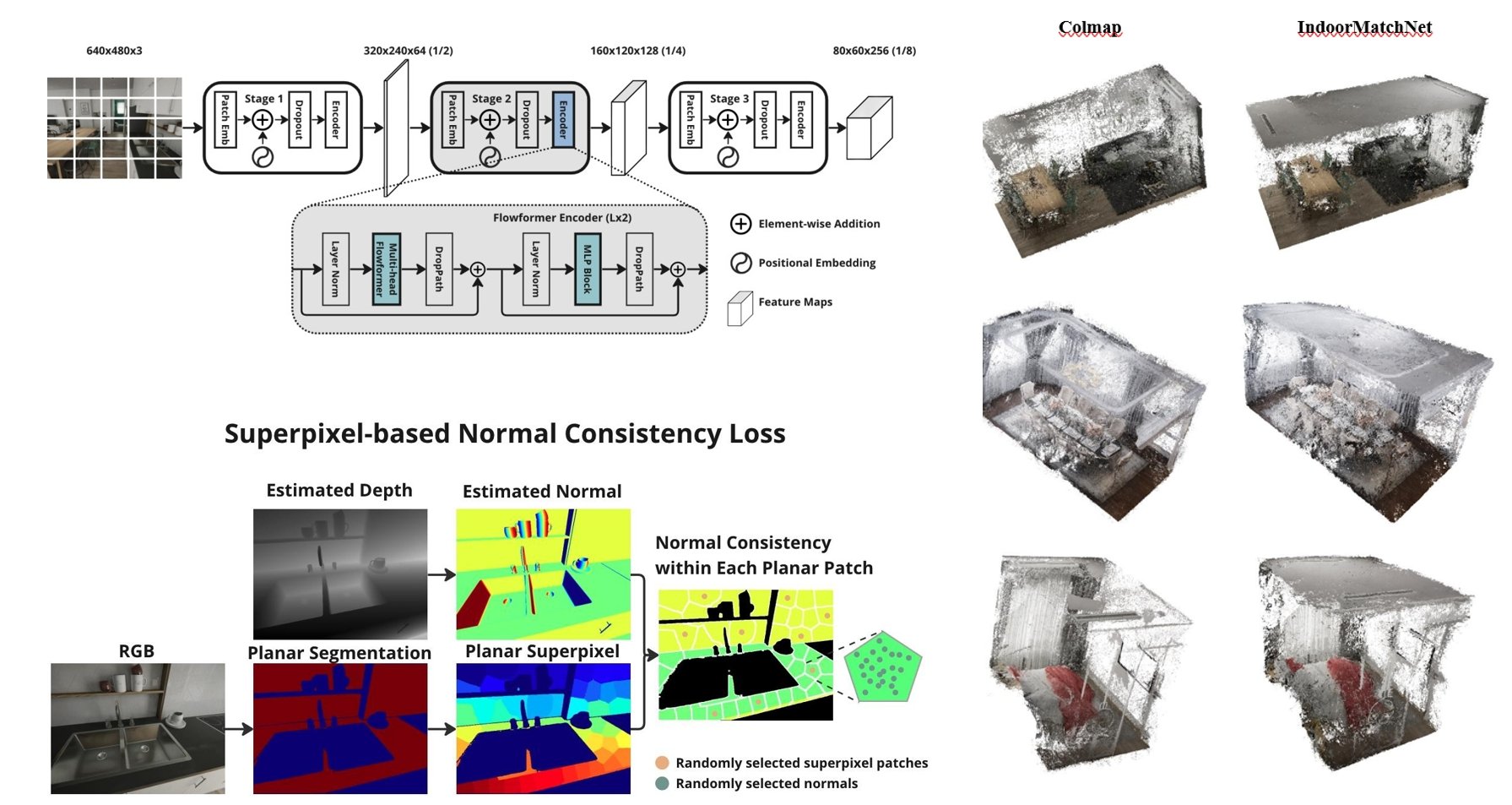
Enhancing 3D reconstruction of textureless indoor scenes with IndoReal multi-view stereo
This paper presents the “IndoReal-MVS” dataset, a rich indoor-centric compilation reflecting real-world phenomena through advanced computer graphics. It introduces unsupervised “IndoorMatchNet”, synergising Feature Pyramid Network (FPN) and Pyramid Flowformer (PFF) for encoding complex indoor geometries.
Hu, D., Gan, V.J.L.,* etc. • Building and Environment (8.2022)
Multi-agent robotic system (MARS) for UAV-UGV path planning and automatic sensory data collection in cluttered environments
This paper presents a multi-agent robotic system for automatic UAV-UGV path planning and indoor navigation to automate sensory data collection. An enhanced shunting short-term memory model is proposed to optimise the pathfinding, 2D image and 3D point cloud data collection.

Gan, V.J.L.,* • Automation in Construction (2.2022)
BIM-based graph data model for automatic generative design of modular buildings
This paper presents a Building Information Modelling (BIM)-based graph data model for the theoretic representation of spatial attributes, topological relationships, geometries, and semantics for generative design of modular buildings.

Research Highlight
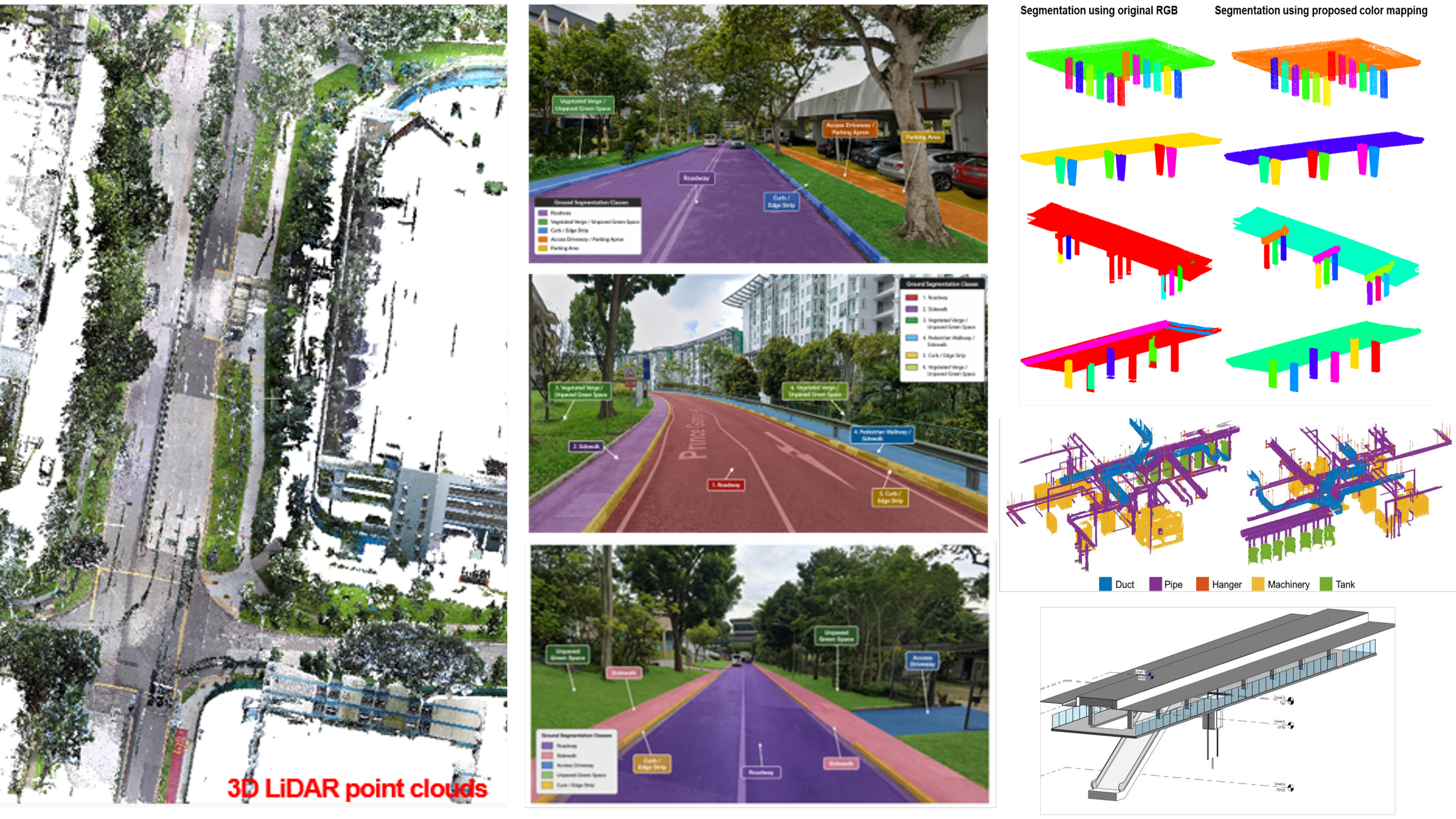
Robotic Reality Capture and Automated 3D Scanning: Our research on robotic 3D scanning focuses on sensor perception models, 3D scene reconstruction and understanding algorithms, semantic mapping and navigation methods to support automated quality-assured data acquisition in semi-structured environments. This research potentially saves the time and manpower for data acqusition.
Developed sensor perception models and environment-aware trajectory optimisation for assuring robotic scan data quality
Multi-view, GS-SLAM, and domain adaption algorithms for 3D scene reconstruction and understanding in weakly-textured environments
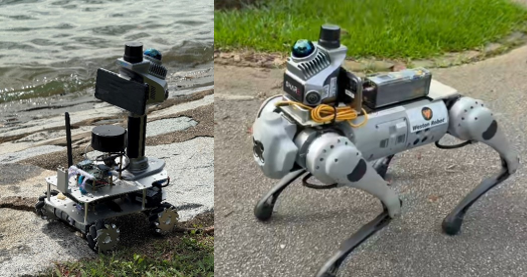
Robot semantic 3D perception, navigation and autonomous LiDAR mapping in semi-structured environments
Our team members are pursuing Scan2BIM robot to support the digitalisation and diagnosis of buildings and infrastructures
AI-assisted Scan-to-BIM and Digital Twin: Building on robotic 3D data acquisition, our research aims to develop different geometric representation learning pipelines to transform 3D spatial data into structured, semantically-enriched BIM models aligned with building foundation model requirements. Key highlights are summarised below:
Developed weakly-supervised learning, VLM or zero-shot SAM, and BIM-synthetic point cloud pipelines for semantic instance segmentation of spatially complex industrial facilities and infrastructural components
DR-GANet and knowledge-based inferencing to process heterogeneous point clouds and automated BIM reconstruction
Semantic similarity matching and relationship classification for semantic enrichment of BIM data to generate engineering models
Computational Design Optimisation: Beyond 3D BIM reconstruction, our research further investigates graph neural network and broad pre-training of 3D BIM geometry to capture the structural priors and support the optimisation of topologically valid and buildable structural systems for digital fabrication. Below are the research highlights:
Proposed BIM-based graph data model to integrate building spatial, geometric & topological features
Developed deep learning and bio-inspired generative design algorithms to optimise building shape, structural topology and element sizing, capturing both structural integrity and constructability requirement
Automated BIM-CAM data exchange and IFC-based tracking to support prefabrication of reinforced concrete components